Here we are again, working on the new version of the e-longboard
Too slow to climb hills, too limited in range, not enough acceleration, it was time to go 4 wheel drive.
4 WD is a nightmare, you need 4 motors (Obviously…), 4 electronic boards (and these are quite expensive or required a good amount of time to solder everything) but also twice more current coming from the batteries in comparison to the previous two wheel drive and it’s way heavier…. but worth it !
Of course you can limit your acceleration to draw the same total amount of current in your 4 motors than you used in 2 motors but it wouldn’t be fun.
So motors, batteries and casing are the main point of that upgrade :
I bought 2 used motor to a British man and make them delivered. This time they are not black but orange, it will be great to see where is the front and where is the back of the board.

When they arrived, one of them had some broken hall sensors. Unfortunately I tried to replace them but no luck…. Only Chinese semi-crappy-copy were available but it’s no big deal, gonna drive it without sensors, just by looking at the back EMF.

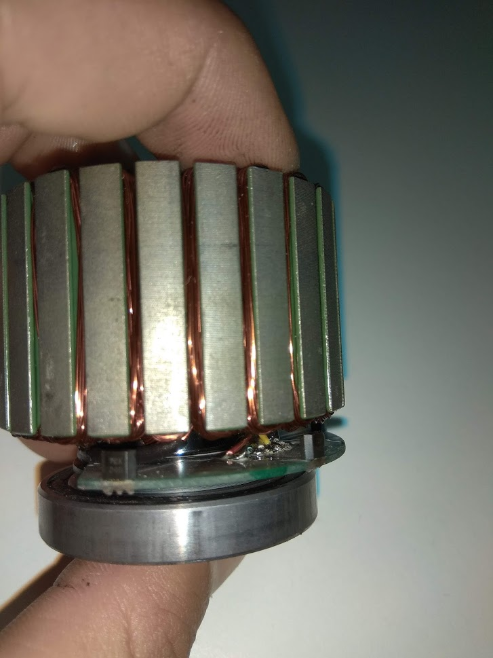
Figure : Cage+ wheel. We can see the 28 magnets.

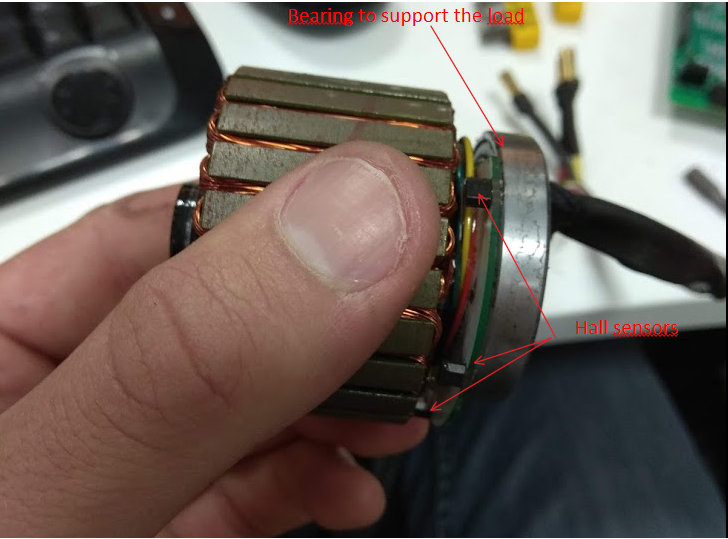
There are 3 hall sensors with 60° between them. Each of these sensors will see a specific strength of the magnetic field according to the rotor position. These sensors, 72X, have a hysteresis behavior with two switching points at 2.5 and -2.5 mT.
By combination of these three sensors we know which phase of the brushless motor we should turn on. Also it gives us an estimation of the speed of the motor.
As some of them are not working we will need to estimate the position with the back EMF generated by the motor. This method consist in looking at the voltage created by the movement of the motor on the phases. Therefore the position can be approximated and the rotor can be driven. This method is often used when no sensor data are available or at really high speed when the bandwidth of the sensors is too low.
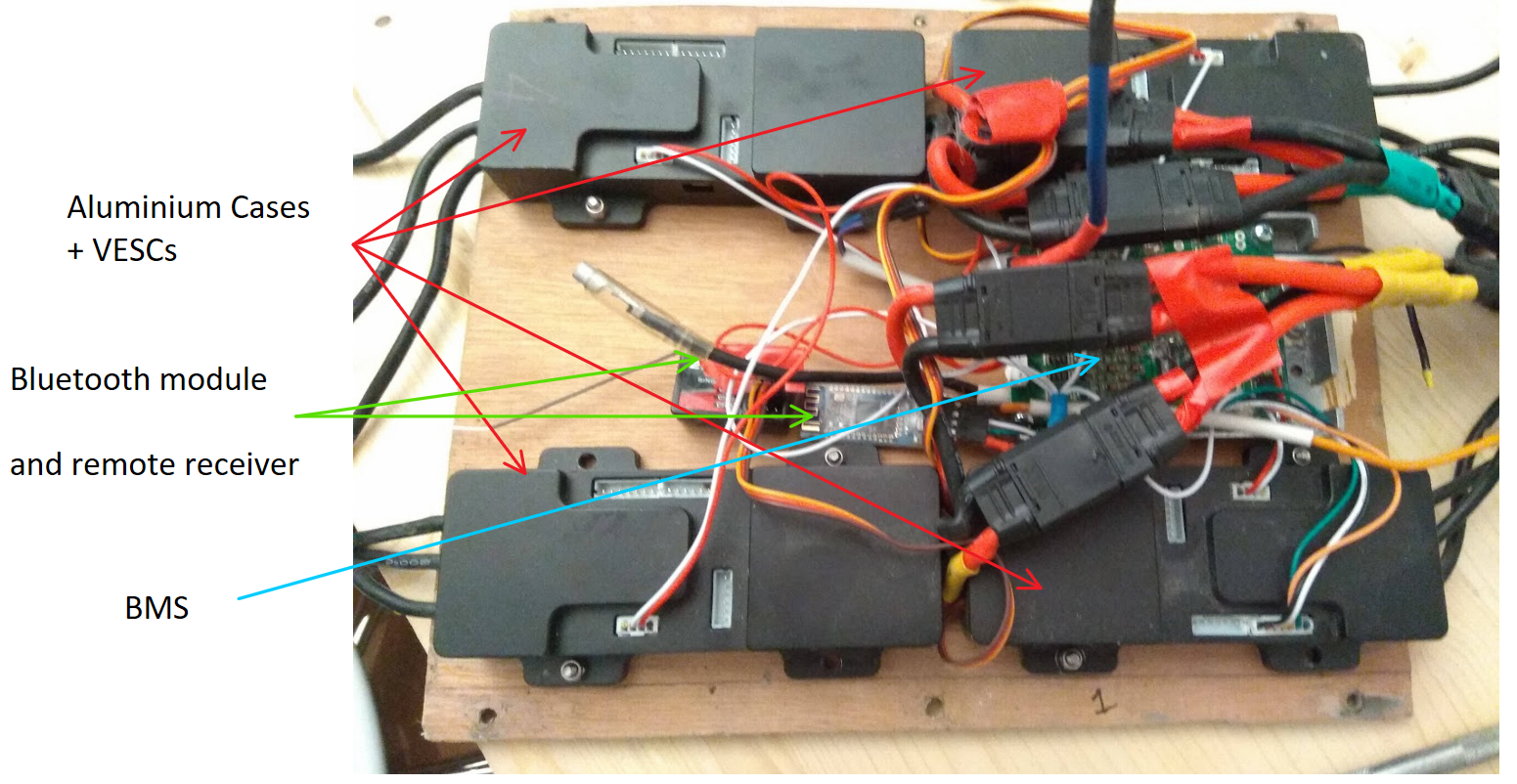
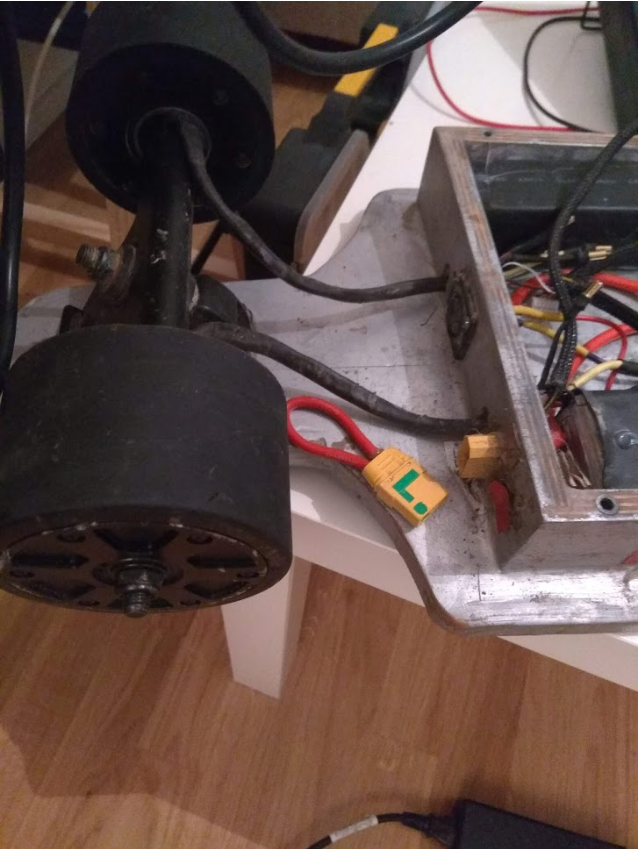
4 motors mean 4 electronic controllers. Therefore I needed to save space, so I bought some aluminium cases to protect and dissipate heat from the PCBs.
The extra space was needed for the batteries : 20 brand new batteries (LiPo 5000 mAh) have to fit inside the box in order to do a big 10s 2p 10Ah battery.

Then it was time to apply some heat shrink and wire them with some XT90 connectors.
These connectors are able to support a high amount of current, higher than the previous XT60 connectors.
The BMS wasn’t able to handle that amount of current so a simple XT90 Anti sparks connector was used as a key to turn on or off the board and there is no undervoltage and balance cutoff anymore. The BMS is now only used to charge and balance the cells while charging.
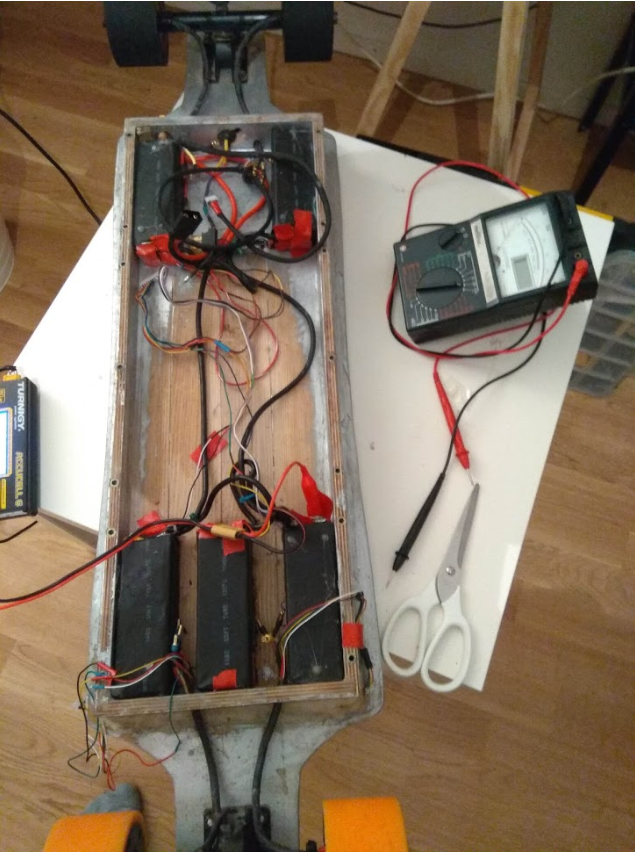
As it is a big amount of wide wire the back plate is now in three parts. The two side panels cover the batteries and the middle one supports the electronics. It makes the repair/check/maintenance easier.
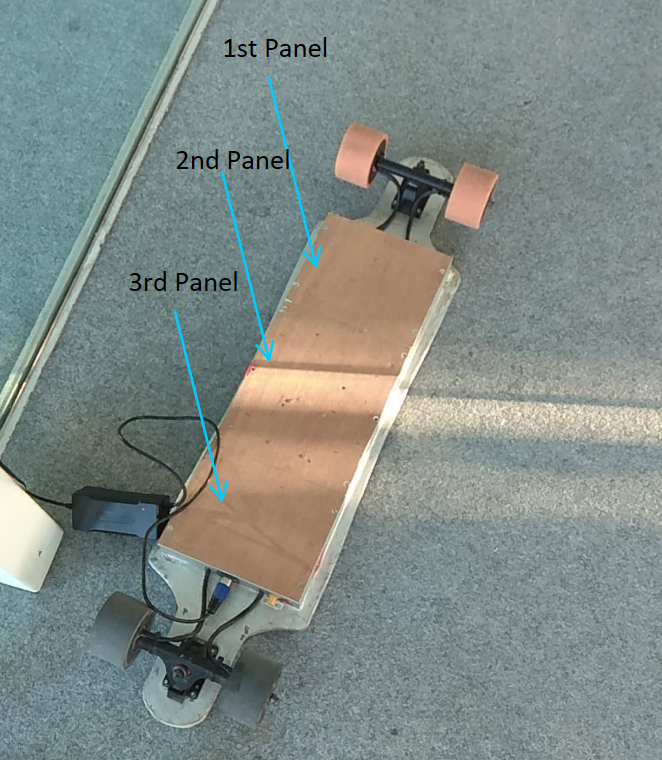
Figure : Final result charging
With these 4WD I am able to climb any hill at a speed of 30km/h minimum and have a range around 30km. It worked so well that a light commercial vehicle smashed me at a roundabout(And trust me it is not so “light”). The driver didn’t see me, was distracted and entered the roundabout in a hurry while I was exiting it. Got hit but more scared than hurt, the longboard didn’t get any damage but has been confiscated by the police for investigation and I recovered it 3 months later with some batteries dead. Indeed unloaded, the batteries have been in deep discharge over time. So, videos will come later.
Next upgrade will then be flashlight and horn.
Superbe présentation. Et en anglais. Mais accessible à mon niveau 👍👍
J’attends la suite avec impatience
J’ai été attentive mais de là à construire un modèle maison… On dira que c’est parce que je n’en ai pas l’utilité