This article is a retrospective of the adventure I participated in 2017 as a programmer, electronic mentor and as Captain of the team.
FIRST Robotics Competition is a competition created for high-school teenagers (15-18 years old). During a 6 weeks period, each team has to analyse, design, create and code a robot. There are some limitations for the robot (size, weight, price…) but it can be driven by a player (during most of the game) to score points which simplify the challenge.
For the first 15 seconds, the robot can be autonomously driven (by software) to score extra points and it is on that aspect that we have been introduced to help and mentor the Robolyon team.
Robolyon is the 5553th team to join the FIRST competition, but the first one coming from France. This 3 years old team, when we joined it, included around 20 motivated high school students.
Two of my friends (Anthony PIQUET and Sylvain MIGAUD), members of Galileo-CPE and students at CPE-Lyon, and me joined the team for this season as programmers and electronics mentors.
Every year the season start in January, then each team must design, build and program their robot in only 6 weeks.
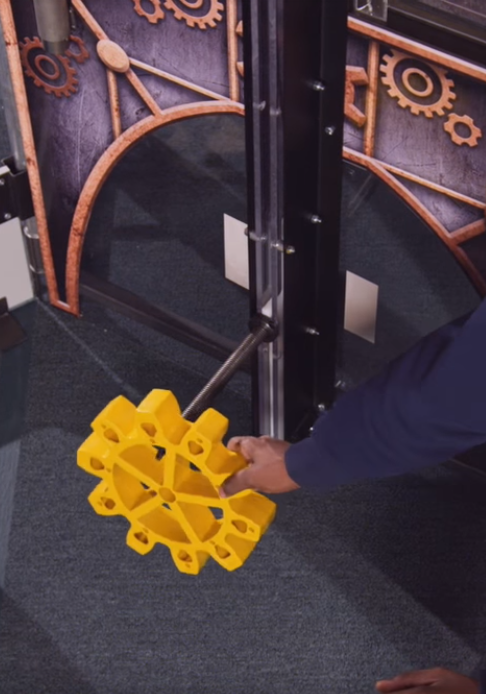
In 2017 the game was to collect “gears” (Circular objects) and place them on pegs located on the field. The robot should also collect and throw balls in a basketball-basket style and finally climb at the top of a rope, 1.5m higher than the ground to score more points.
A more detailed video can be find here : https://www.youtube.com/watch?v=EMiNmJW7enI
To simplify the challenge and increase our success rate, the team decided to only achieve two of the three goals. Collecting (and placing the gear) and climbing at the rope will be the key points of our robot. In order to train the pilot, we also built two identical robots, so when the first robot will be sent to the competition few weeks before the pilot will still be able to train.
During a match, the pilot is assisted by a co-pilot to control complex manoeuvres, and both respond to the captain for the strategy and the game vision.
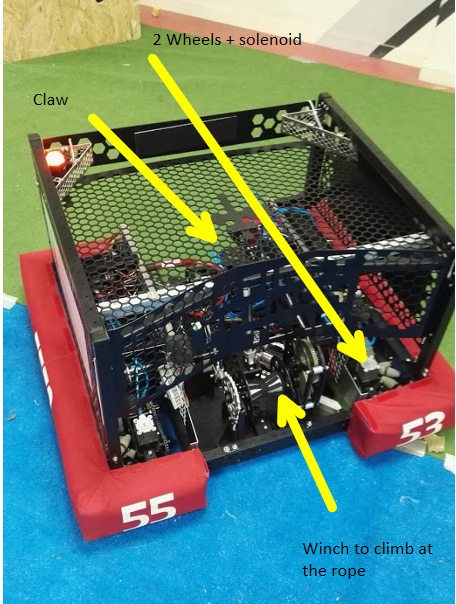
After few weeks of thorough design, we obtained neither a 4 or 6 wheels robot but a 8 wheels robots ! (2 wheels and 1 solenoid at each corner).
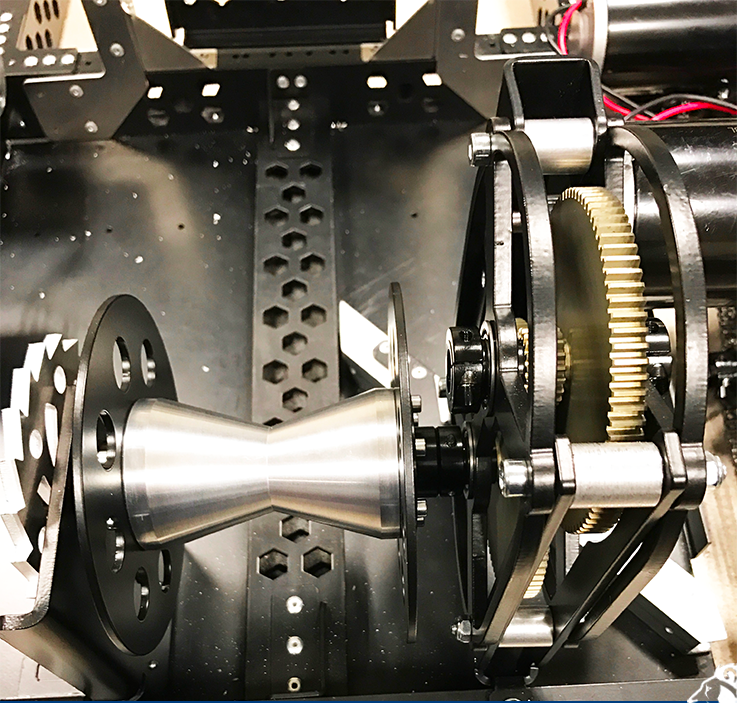
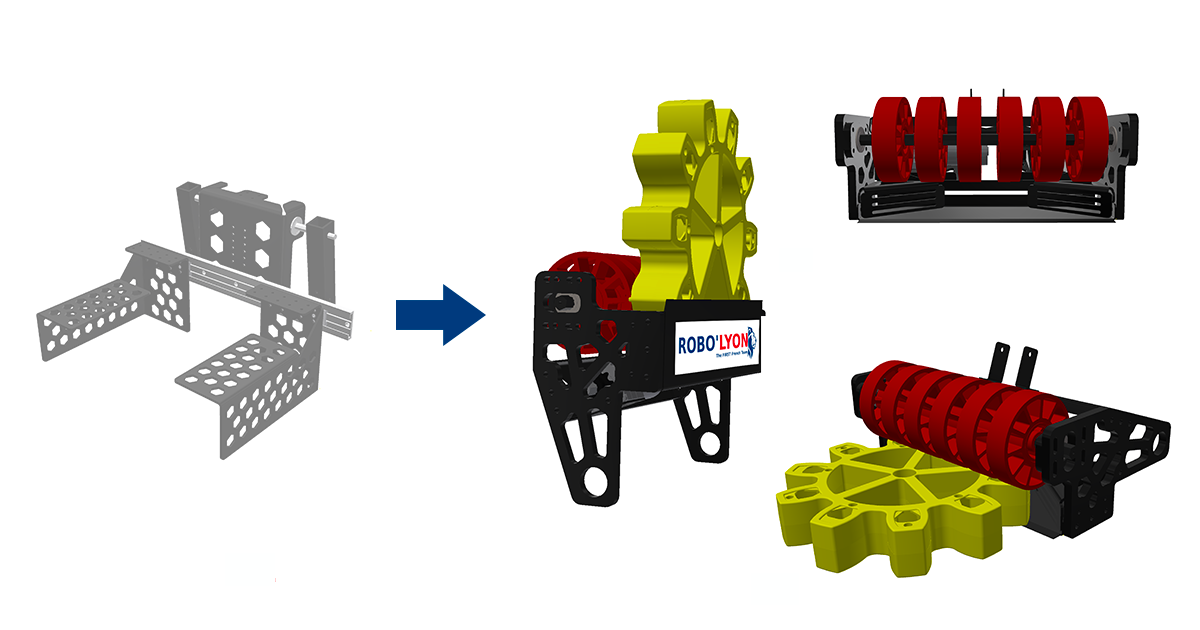
The rope (made from velcro) will first grip at the surface of the winch (recovered with velcro too). Then the rope will wind around the winch and centered itself due to the shape of the metal part. After one turn, the rope will then tight itself and hold the weight of the robot.
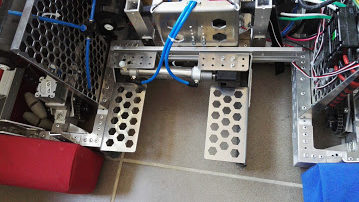
The gear (facing the floor) will be hold by the two metal brackets. When the solenoid open the claw, the gear has more than enough space to fit between them. Once closed, the bracket will hold the gear while the system do a 90° rotation to face it forward.
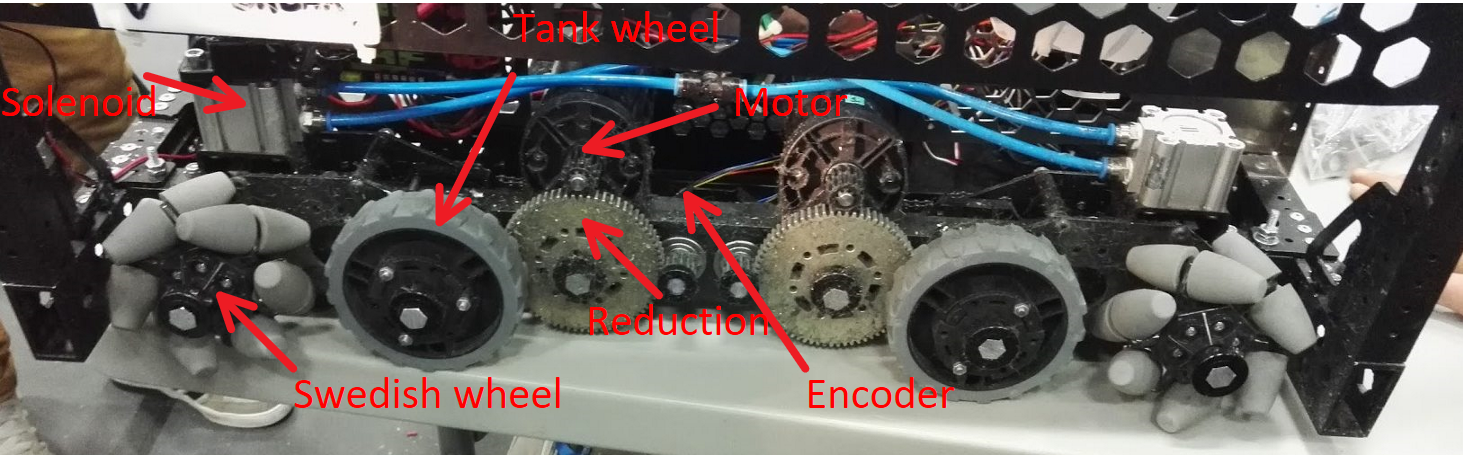
At each corner of the robot, there are 2 wheels (one Swedish and one classic) and a solenoid attached to the Swedish wheel’s rotational axis. When the solenoid is activated, it pushes the Swedish wheel down, rising up the robot and then allow it to move in every direction. The pilot can then move everywhere while keeping the right orientation of the robot.
When the solenoid is not activated, the robot lie down on the classic wheel which allows it to move faster with more torque to push other robots (and to drift less when being pushed).
A quick video showing our robot doing the Omnidrive type of movement with the Swedish wheels below:
Last 10 seconds : Omnidrive movement
You can hear a “click” sound when the solenoid pops in
So we went to Montreal for 3 days of competition in March 2017. Unfortunately, the encoders have been damaged in the shipping, so the autonomous period wasn’t working properly. But we still achieved to be first at the ranking and won the competition.
At the competition, we started by playing 9 matches with 5 other random teams (3 vs 3 robots). At the end of these matches, the 9 best teams have to select 2 other teams in order to compete together the finals as an alliance. At this point, we were 3rd of the ranking and we decided to team up with the team 5528 Ultime (6th) for their accurate robot to shoot ball in the basket and 3386 Tornades (19th) for their quick robot and their strong ability to play with gears. Together we ended up winning every other alliances and then qualify for the world championship in St Louis.
We also won the Chairman award this year. This award is, according to the FIRST, ” The most prestigious award at FIRST, it honors the team that best represents a model for other teams to emulate and best embodies the purpose and goals of FIRST “.
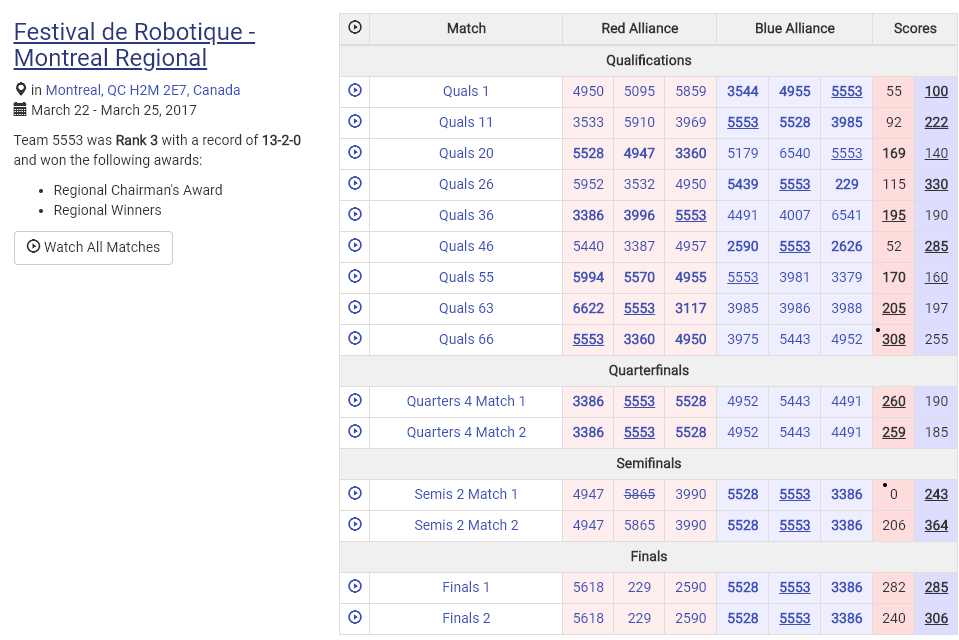
https://www.thebluealliance.com/team/5553/2017
You can find there videos of every of our matches
During the semifinals, we realized that a robot smashed our clamp and we were not able to play gears anymore. Therefore we played defense and it worked well.
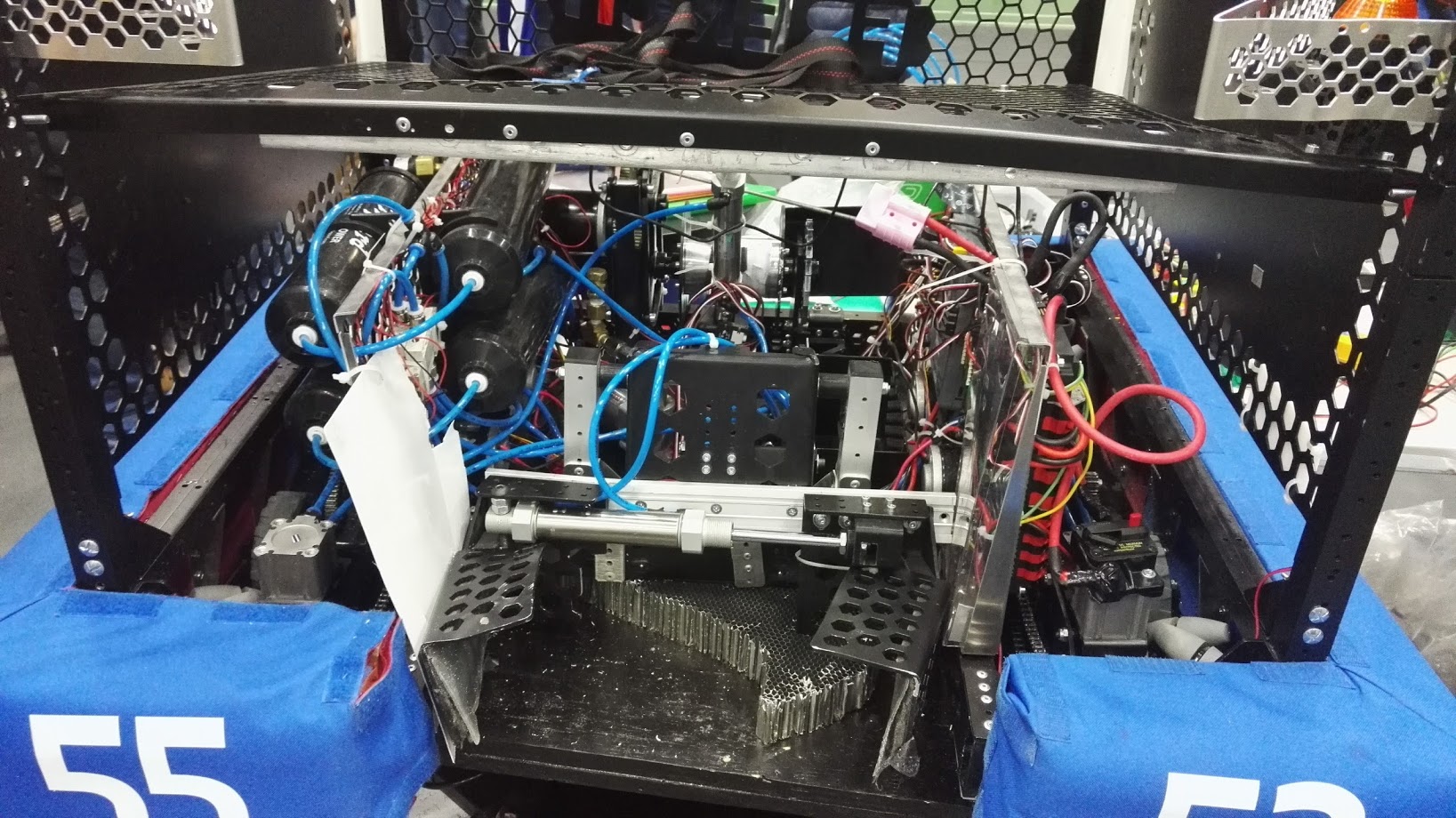
We had few weeks before the St Louis competition and we decided to develop a new, more efficient, mechanism to grab gears. So we went back to the workshop and started prototyping during the short amount of time we had.

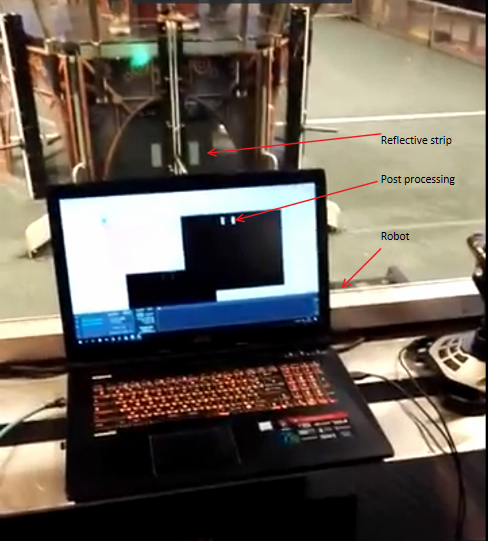
As you can see on the above picture, we also added a green circle of LED for the camera. Indeed we decided to do not use encoder to know our position but a camera and some image processing.
At the beginning of the match our robot is loaded with a gear and has to drop it at a peg. Each peg has two reflective strips next to them. By lighting them up with our LEDs, we can filter, select and measure the size of these strips. By extrapolating their size and the resolution of the camera, we can then estimate the position of the robot from its goal. So with a PID regulator we were able to achieve good and reliable results. Unfortunately I didn’t had time to take any video.
On our way to St Louis, our plane to Frankfurt has been delayed and all the team had to take the next day plane to St Louis. Therefore we missed one day of competition and didn’t pass the pool. It was still an awesome experience and I would recommend it to anyone interested in robotics.
I can’t wait to see what these kids will be able to do at the end of their studies. Some of them, at the age of 17, were more capable than some of my 23 y/o classmates in many robotics aspects.
Code can be find here : https://github.com/Guilhem74/RoboFrc/
really interesting ! But the supreme challenge wouldn’t it be to imagine a motorized longboard, able to ride on the roads of Lausanne’s area in complete safety ?
You’re rehashing dad. 😁
Good memories ! May I advise to check the rule for 3rd person of singular with the verb.
I’m not Ä robot 🙃
I should probably and I will.
I’m not a robot too 😂(for now)